
|
Arduino/Fahrregler analog Download Analog PWM: Mit einem Arduino (bzw. einem ATmega328) und einer H-Brücke kann ein Fahrregler gebaut werden, der relativ feinfühlige Langsamfahrt erlaubt und dessen Regler sowohl Geschwindigkeit und Richtung einstellt: Nach links drehen - Rückwärtsfahrt, nach rechts drehen - Vorwärtsfahrt. Weiter ist eine Massensimulation einstellbar, sowie die Anfahrschwelle. Die Regelkurve ist nicht linear, so dass im langsamen Bereich feinfühlig geregelt und im schnelleren Bereich zügig beschleunigt werden kann: Noch bessere Ergebnisse würde man erhalten, wenn man wie bei Digitaldecodern üblich die GegenEMK des Motors messen und zur Regelung nutzen würde, dann entfiele auch der Einsteller der Anfahrschwelle. Das macht z.B. Jeremy Brandon mit seinem DeLuxe-Fahrregler, der über Joerger (dort etwas nach unten scollen..) vertrieben wird. (Das Ganze funktioniert aber nur, wenn nur eine Lok - möglichst ohne beleuchtete Wagen - gesteuert wird.) Die H-Brücke mit dem L298 wurde fertig gekauft. (Eigentlich kann man mit ihr zwei Motoren steuern...) China liefert fertige Boards fast zu dem Preis, der hierzulande für das IC verlangt wird. (Bei Ebay nach L298 suchen.) Die H-Brücke erhält man für ca. 4€, den 328 mit Bootloader für ca. 3€ (z.B. im Guloshop), so dass man für ca.10€ plus Material aus der Bastelkiste sich diesen Fahrregler bauen kann. (Je nachdem, was in der Bastelkiste fehlt, kommt der Regler auch auf bis zu 20€.) In der endgültigen Version wird der ATmega328 vom Arduinoboard abgezogen und auf eine eigene Lochrasterplatine mit Oszillator gesetzt:   Hier das Schaltbild: 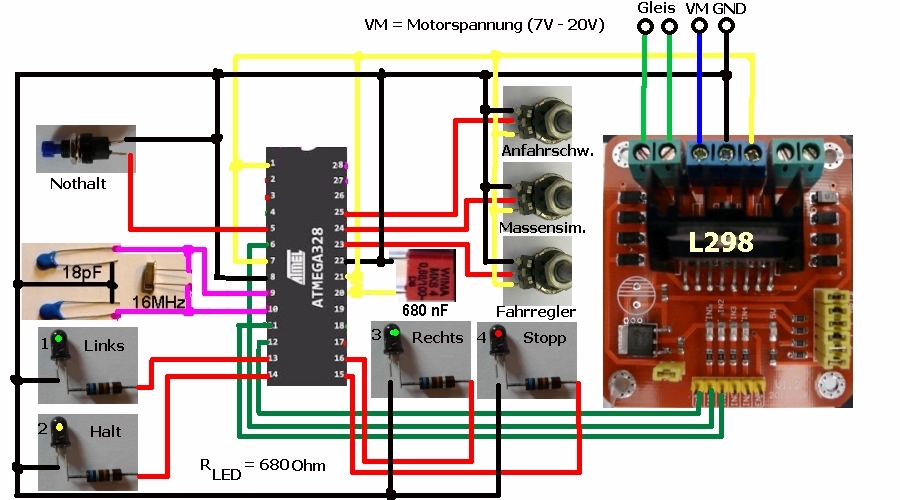 (Die Potiwerte 10k und 100k waren zufällig vorhanden, es gehen alle Werte von 4k7 bis 100k. Einzige Bedingung: Linear sollten sie sein.) Ein Arduino Nano ist fast so billig geworden wie ein ATMega328 mit Bootloader plus Quartz, so daß es sich anbietet, direkt einen Nano zu nehmen. Für diesen Fall folgt hier das Schaltbild: 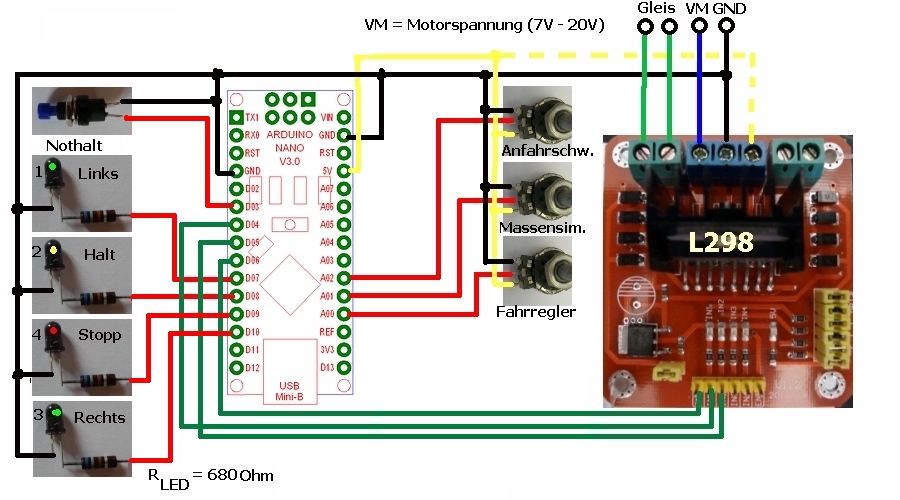 Die Stromversorgung der H-Brücke reicht von 5V bis 36V, so dass der Regler an praktisch alle Bedürfnisse und Spuren angepasst werden kann. Er wurde mit 5V-Versorgung mit Spur T getestet, mit 10V-Versorgung mit Spur Z, sowie mit 16V-Versorgung mit Spur N und Spur H0. Die H-Brücke ist zwar kurzschlussfest, mit dem relativ kleinen Kühlkörper erwärmt sie sich im Kurzschlussfall jedoch kräftig, so dass sie nicht dauerkurzschlussfest ist. Einstellen der Massensimulation und der Anfahrschwelle: Massensimulation: je nach Belieben...(Bei hohen Werten ist Ihr Eisenbahnergeschick gefordert..) Anfahrschwelle : Fahrregler so stellen, dass soeben in eine Richtung gefahren wird (niedrigste Fahrstufe). Dann den Regler Anfahrschwelle soweit aufdrehen, dass die Lok gerade eben anfährt. Ein Nachteil soll jedoch nicht verschwiegen werden: aufgrund der PWM-Frequenz von ca. 1kHz ist beim Anfahren bei einigen Loks ein "Singen" zu hören. Die PWM-Frequenz läßt sich aber vor dem Brennen ändern, es müssen dazu im Setup bei der gewünschten Einstellung die Kommentarzeichen entfernt werden. Unter anderen hat Herr Repin diesen Regler nachgebaut, hier zwei Fotos:   Von ihm stammt auch der Tipp, daß man die Leitungen zum Gleis verdrillen sollte. Download des Sketch. Es gibt auch eine Weiterentwicklung, den Universalregler. Fahrregler ohne Arduino finden Sie hier.  |